
Penilaian sukses pertama dari teori kontrol PID secara praktis diverifikasi di bidang sistem kemudi otomatis untuk kapal, kembali sekitar tahun 1920. Setelah itu, teori ini diterapkan dalam berbagai kontrol proses otomatis industri yang membutuhkan spesifikasi keluaran pabrikan yang dioptimalkan dan akurat. Untuk unit manufaktur, PID diimplementasikan secara populer untuk mencapai kontrol pneumatik yang presisi, dan akhirnya teori PID diterapkan dalam pengontrol elektronik di zaman modern.
Apa itu Kontroler PID
Istilah PID adalah singkatan dari proporsional integral derivative controller, yang merupakan mekanisme loop umpan balik, yang dirancang untuk secara akurat mengontrol berbagai mesin kontrol industri, dan banyak aplikasi serupa lainnya yang memerlukan kontrol modulasi kritis dan otomatis.
Untuk menerapkan ini, pengontrol PID secara terus menerus memantau operasi sistem, dan menghitung elemen kesalahan yang diinduksi. Itu kemudian mengevaluasi nilai kesalahan sesaat ini dalam bentuk perbedaan antara set-point (SP) yang diperlukan, dan variabel proses yang diukur (PV).
Dengan mengacu pada hal di atas, koreksi umpan balik seketika dan otomatis dijalankan dalam bentuk ekspresi proporsional (P), integral (I), dan turunan (D), dan karenanya dinamai pengontrol PID.
Dengan kata sederhana, pengontrol PID terus memantau kerja sistem mesin tertentu, dan terus mengoreksi respons keluarannya tergantung pada variasi yang disebabkan oleh pengaruh eksternal, melalui algoritme yang ditentukan. Dengan demikian memastikan bahwa mesin selalu bekerja dalam kondisi ideal yang ditentukan.
Memahami Diagram Blok PID
Kontroler PID dianggap sebagai sistem kontrol serbaguna karena kemampuannya untuk mendeteksi dan mengelola 3 parameter kontrol: proporsional, integral, dan turunan, dan menerapkan kontrol optimal yang diinginkan pada keluaran dengan akurasi ekstrim, dengan mengacu pada 3 parameter ini.
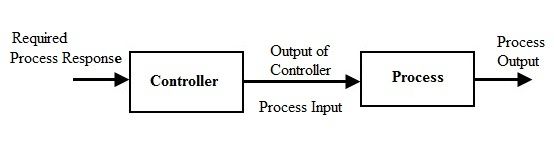
Gambar di bawah ini menunjukkan diagram blok PID. Kita dapat dengan cepat memahami prinsip dasar kerja PID dengan mengacu pada diagram blok ini.

gambar milik: en.wikipedia.org/wiki/File:PID_en.svg
Di sini kita dapat melihat sekumpulan variabel seperti e (t) yang sesuai dengan nilai kesalahan, r (t) sesuai dengan set point yang ditargetkan, dan y (t) sebagai variabel proses yang diukur. Kontroler PID selama operasinya memantau nilai kesalahan e (t) dengan menilai perbedaan antara setpoint r (t) atau SP yang dimaksudkan dan nilai proses terukur y (t) atau PV, dan akibatnya mengeksekusi koreksi umpan balik atau optimasi menggunakan parameter yaitu: proporsional, integral, dan turunan.
Pengontrol terus melakukan upaya untuk mengurangi efek kesalahan, dengan menyesuaikan variabel kontrol u (t) ke nilai baru berdasarkan jumlah bobot yang dianalisis dari istilah kontrol (p, I, d).
Misalnya, dalam pengoperasian kontrol katup, pembukaan dan penutupannya dapat secara kontinu divariasikan oleh PID melalui penilaian yang rumit, seperti dijelaskan di atas.
Dalam sistem yang ditampilkan berbagai istilah dapat dipahami seperti yang dijelaskan di bawah ini:
P- Pengontrol:
Istilah P sebanding dengan nilai kesalahan sesaat e (t) yang diperoleh dengan menilai hasil untuk SP - PV. Dalam situasi dimana nilai error cenderung semakin besar, maka output kontrol juga semakin besar secara proporsional dengan mengacu pada faktor gain “K”. Namun dalam proses yang membutuhkan kompensasi seperti dalam kontrol suhu, kontrol proporsional secara soliter dapat menyebabkan ketidakakuratan di seluruh setpoint dan nilai proses aktual, karena tidak dapat bekerja secara memuaskan tanpa umpan balik kesalahan untuk menghasilkan respons proporsional. Menyiratkan bahwa tanpa umpan balik kesalahan, tanggapan korektif yang tepat mungkin tidak dapat dilakukan.
I- Pengontrol:
Istilah I bertanggung jawab atas nilai kesalahan SP - PV yang dievaluasi sebelumnya, dan mengintegrasikannya selama periode operasionalnya untuk membuat istilah I. Misalnya saat kontrol proporsional diterapkan jika SP - PV menghasilkan beberapa kesalahan, parameter I aktif dan mencoba menghentikan kesalahan sisa ini. Ini sebenarnya terjadi dengan respons kontrol yang dipicu karena nilai kumulatif dari kesalahan yang direkam pada waktu sebelumnya. Segera setelah ini terjadi, istilah I berhenti meningkat lebih jauh. Hal ini menyebabkan efek proporsional untuk meminimalkan seiring dengan berkurangnya faktor kesalahan, meskipun ini juga mendapat kompensasi saat efek integral berkembang.
D- Pengontrol:
Istilah D adalah perkiraan yang paling cocok untuk disimpulkan tren yang berkembang untuk kesalahan SP-PV, tergantung pada tingkat perubahan sesaat dari faktor kesalahan. Jika laju perubahan ini meningkat dengan cepat, kontrol umpan balik akan diterapkan lebih agresif, dan sebaliknya.
Apa itu Tuning PID
Parameter yang dibahas di atas mungkin memerlukan penyeimbangan yang benar untuk memastikan fungsi kontrol yang optimal, dan ini dicapai melalui proses yang disebut 'loop tuning'. Konstanta tuning yang terlibat dilambangkan sebagai 'K' seperti yang ditunjukkan pada potongan berikut. Masing-masing konstanta ini harus diturunkan secara individual untuk aplikasi yang dipilih, karena konstanta sangat bergantung dan bervariasi sesuai dengan karakteristik dan pengaruh parameter eksternal tertentu yang terlibat dalam loop. Ini mungkin termasuk respon sensor yang digunakan untuk mengukur parameter tertentu, elemen throttling akhir seperti katup kontrol, kemungkinan selang waktu dalam sinyal loop dan proses itu sendiri, dll.
Mungkin dapat diterima untuk menggunakan nilai perkiraan untuk konstanta pada awal implementasi berdasarkan jenis aplikasi, namun hal ini pada akhirnya mungkin memerlukan beberapa penyesuaian dan penyesuaian yang serius melalui eksperimen praktis, dengan memaksa perubahan pada titik setel dan kemudian mengamati respon dari kontrol sistem.
Apakah model matematika atau dalam loop praktis, keduanya dapat dilihat menggunakan tindakan kontrol 'langsung' untuk istilah yang ditentukan. Artinya ketika peningkatan kesalahan positif terdeteksi, kontrol positif yang meningkat terkait dimulai untuk mengontrol situasi untuk istilah yang terlibat diringkas.
Namun ini mungkin diperlukan untuk dibalik dalam aplikasi di mana parameter keluaran mungkin memiliki karakteristik yang dikonfigurasi secara berlawanan sehingga memerlukan tindakan korektif terbalik. Mari kita pertimbangkan contoh loop aliran di mana proses pembukaan katup ditentukan untuk beroperasi menggunakan keluaran 100% dan 0%, tetapi perlu dikontrol dengan keluaran 0% dan 100% yang sesuai, dalam hal ini kontrol koreksi terbalik menjadi penting. Untuk lebih tepatnya, pertimbangkan sistem pendingin air yang memiliki fitur perlindungan di mana katupnya harus 100% terbuka selama kehilangan sinyal. Dalam hal ini, keluaran pengontrol harus dapat diubah menjadi kontrol 0% jika tidak ada sinyal, sehingga katup dapat terbuka pada 100% penuh, ini disebut sebagai kontrol 'kerja balik'.
Model Matematika dari Fungsi Kontrol

Dalam model matematika ini, semua konstanta non-negatif Kp, Ki, dan Kd menandakan koefisien untuk suku proporsional, integral, dan turunannya masing-masing (pada beberapa kesempatan ini juga dilambangkan dengan P, I, dan D).
Menyesuaikan Ketentuan Kontrol PID
Dari diskusi di atas, kami memahami bahwa pada dasarnya sistem kontrol PID bekerja dengan tiga parameter kontrol, namun beberapa aplikasi yang lebih kecil mungkin lebih suka menggunakan beberapa istilah ini atau bahkan satu istilah dari ketiga istilah tersebut.
Kustomisasi dilakukan dengan membuat istilah yang tidak digunakan ke pengaturan nol, dan menggabungkan beberapa istilah PI, PD atau istilah tunggal seperti P atau I. Di antara ini, konfigurasi pengontrol PI lebih umum karena istilah D biasanya rentan terhadap noise pengaruh dan karena itu dihilangkan dalam banyak kasus, kecuali sangat diwajibkan. Istilah I biasanya disertakan karena memastikan sistem mencapai nilai target optimal yang diinginkan pada keluaran.
Sebelumnya: Bagaimana Mendesain Konverter Flyback - Tutorial Komprehensif Berikutnya: Stabilizer Tegangan Otomatis 5 KVA hingga 10 KVA - 220 Volt, 120 Volt


![Kontrol Lampu, Kipas, menggunakan Remote TV [Diagram Sirkuit Penuh]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)