Pada postingan kali ini kita akan membahas dasar-dasar perakitan bodi quadcopter menggunakan pipa dan baut aluminium, pada bagian artikel selanjutnya kita juga akan membahas mengenai rangkaian drone sederhana yang bisa digunakan untuk menerbangkan rakitan drone kecil tanpa bergantung pada mikrokontroler yang kompleks.
Sebuah quadcopter mungkin adalah mesin terbang paling sederhana yang membutuhkan jumlah minimum akurasi dan komplikasi aerodinamis, dan oleh karena itu tidak mengherankan, ia bisa mendapatkan popularitas luar biasa di antara berbagai penghobi yang berhasil membangun ini .... mesin yang mereka dapat terbang dan terbang kontrol atas keinginan mereka sendiri.
Dinamika Quadcopter
Fakta bahwa drone quadcopter adalah yang paling sederhana dalam hal teknis dan dinamika sebenarnya karena keterlibatan 4 baling-baling dan struktur rangka yang seimbang, yang memungkinkan mesin terbang dengan keseimbangan yang relatif baik, bahkan dalam kondisi iklim yang sulit.
Tetapi kesederhanaan juga menyiratkan bahwa sistem mungkin tidak seefisien model pesawat dan helikopter konvensional yang dirancang dengan rumit untuk menunjukkan efisiensi ekstrim dalam hal kecepatan dan konsumsi bahan bakar, dan tentu saja kemampuan menahan beban ... semua ini pada dasarnya bisa jadi pada dasarnya kurang dalam sistem quadcopter tipikal.
Namun demikian, sejauh menyangkut proyek hobi, mesin ini menjadi pilihan ideal bagi sebagian besar peminat yang merasa sangat lucu dan menarik untuk membangun mesin terbang sendiri, di rumah, yang pada akhirnya 'mendengarkan' dan terbang ke arah mana pun. pengguna lebih suka pindah.
Namun, untuk pemain baru, yang mungkin secara teknis tidak begitu tahu, mungkin merasa mesin sederhana ini sangat rumit untuk dipahami, hanya karena sebagian besar info terkait yang disajikan di banyak situs web gagal membahas konsep secara gamblang dan dalam 'bahasa' itu mungkin cocok untuk orang awam.
Artikel ini telah ditulis secara khusus untuk orang-orang yang tidak terlalu teknis yang tertarik untuk membangun mesin terbang yang luar biasa tetapi merasa subjeknya terlalu sulit untuk dicerna.
Mengapa Quadcopters Begitu Mudah Dibuat Saat Ini
Pernahkah Anda bertanya-tanya mengapa quadcopter dan drone begitu mudah dibuat di dunia saat ini dan mungkin sebelumnya tidak mungkin menggunakan listrik?
Ini pada dasarnya karena pengembangan dan peningkatan Baterai Li-Ion. Ini adalah bentuk baterai yang sangat efisien yang tersedia saat ini yang menawarkan rasio daya terhadap berat yang mengesankan. Bersamaan dengan ini, penemuan motor BLDC dan motor magnet permanen yang sangat halus juga berkontribusi dalam membuat drone mudah dibuat.
Baterai Li-Ion mampu memberikan torsi rotasi yang luar biasa pada motor yang menjadi cukup untuk mendorong unit quadcopter ke ketinggian di atas tanah dalam hitungan detik, dan juga memungkinkannya untuk tetap terbawa udara untuk jangka waktu yang lama. kinerjanya sangat efisien dan bermanfaat.
Bagaimana Quadcopter Lalat
Sekarang mari kita lompat ke kanan dan pahami apa saja hal penting yang diperlukan untuk membuat quadcopter terbang dengan sukses. Berikut adalah dasar-dasar agar mesin berhasil terbang dengan lancar:


1) Pada dasarnya mesin membutuhkan bodi yang kokoh dan kuat, tetapi sangat ringan. Ini dapat dibuat atau dirakit menggunakan pipa ekstrusi aluminium persegi berlubang, dengan mengebor lubang yang sesuai dan memasang bingkai dengan mur dan baut.
2) Struktur harus dalam bentuk '+' sempurna atau 'x' sempurna, tidak ada bedanya selama sudut antara pipa 'persimpangan' masing-masing 90 derajat.

Elemen dasar yang dibutuhkan untuk membangun sebuah quadcopter dapat dilihat pada gambar berikut:

Bagian Simulasi Perakitan
Simulasi animasi kasar di bawah ini menunjukkan tentang cara merakit elemen yang ditunjukkan di atas bersama-sama:

Bagaimana Membangun Kerangka Quadcopter
Aluminium untuk rangka '+' dapat diperoleh dengan memotong dan mengukur pipa ekstrusi aluminium siap pakai secara tepat, seperti yang ditunjukkan di bawah ini:

Ukuran rangka relatif dan oleh karena itu tidak terlalu penting, Anda dapat membuat rangka lebar dengan motor dipasang terpisah lebar atau membangun struktur rangka yang agak kompak di mana jarak motor tidak terlalu lebar ... meskipun harus dipastikan bahwa baling-baling jauh dari satu sama lain untuk memungkinkan keseimbangan dan keseimbangan yang lebih baik.
3) Struktur rangka '+' harus dipasang dengan platform persegi di bagian tengah tempat lengan rangka bertemu dan saling menyilang. Ini bisa berupa pelat aluminium yang dipoles dengan baik dengan dimensi yang sesuai untuk mengakomodasi semua elektronik dan kabel yang diperlukan dengan nyaman.
Jadi pelat pusat atau platform ini pada dasarnya diperlukan untuk memasang dan menampung elektronik sistem yang pada akhirnya akan bertanggung jawab untuk mengendalikan quadcopter Anda.
4) Setelah kerangka di atas selesai, motor harus dipasang di ujung palang, seperti yang ditunjukkan pada gambar di atas.
5) Tidak perlu dikatakan bahwa semua pekerjaan pemasangan harus dilakukan dengan sangat akurat, dan keselarasan sempurna, ini mungkin memerlukan asosiasi fabrikator berpengalaman untuk pekerjaan itu.
Karena semua yang ada dalam desain berpasangan, menyelaraskan elemen secara akurat tidak akan terlalu sulit, ini hanya tentang mengukur dan menyesuaikan pasangan dengan sebanyak mungkin kesamaan, yang pada gilirannya akan memastikan tingkat keseimbangan, keseimbangan, dan sinkronisasi maksimum. untuk sistem.
Setelah kerangka dibangun, saatnya mengintegrasikan sirkuit elektronik dengan motor yang relevan. Ini perlu dilakukan sesuai instruksi yang diberikan di manual sirkuit yang diberikan.
Papan sirkuit dapat dipasang di sisi bawah pelat tengah dengan rumah yang tepat atau di atas pelat, sekali lagi dengan kabinet yang sesuai untuk menutupinya dengan rapat.

Memahami Arah Rotasi Baling-Baling
Menganalisis arah Rotasi baling-baling Motor untuk Balanced Lift-of:
Mengacu pada simulasi animasi di atas, arah putaran baling-baling motor harus diselaraskan dengan cara sebagai berikut:
Ini hanya perlu sedemikian rupa sehingga motor di ujung satu batang harus identik tetapi berbeda dengan arah motor batang lainnya, artinya jika satu batang memiliki motor berputar searah jarum jam, maka motor di ujung batang lainnya melengkapi batang harus disetel untuk berputar berlawanan arah jarum jam. arah.
Silakan merujuk ke simulasi di atas untuk memahami dengan benar gerakan counter-acting motor yang mungkin diperlukan untuk ditetapkan ke motor untuk memastikan pengambilan yang seimbang
Cara Mengontrol arah quadcopter dengan mengontrol kecepatan motor.
Ya, arah terbang dari quadcopter dapat diatur dan dikontrol sesuai keinginan dan keinginan Anda hanya dengan menerapkan kecepatan berbeda (RPM) ke motor terkait.
Gambar berikut menunjukkan bagaimana transmisi kecepatan dasar dapat diterapkan pada motor yang relevan untuk mencapai dan menjalankan arah terbang yang diinginkan ke alat berat:




Seperti yang ditunjukkan dalam diagram di atas, dengan secara tepat menurunkan kecepatan satu set motor, atau meningkatkan kecepatan set motor yang berlawanan, atau mengubah kecepatan sesuai preferensi sendiri, quadcopter dapat dibuat untuk melakukan perjalanan di udara di mana saja. arah spesifik yang diinginkan.
Gambar di atas menunjukkan arah dasar, seperti maju, mundur, kanan, kiri, dll ... namun arah ganjil lainnya juga dapat diterapkan secara efisien dengan menyesuaikan kecepatan motor yang relevan atau mungkin hanya dengan satu motor.
Misalnya untuk memaksa mesin terbang menuju arah N / W, kecepatan hanya motor S / E dapat ditingkatkan, dan untuk memungkinkan mesin terbang pada arah N / E, kecepatan S / Motor W bisa dinaikkan ... dan seterusnya. Ini hanya perlu dipraktikkan sampai kontrol penuh dari quadcopter dapat dicapai dan dikuasai oleh pengguna.
Merancang Quadcopter Praktis
Selama ini kita belajar tentang konstruksi dasar bodi dan hardware drone, sekarang mari belajar cara membuat quadcopter atau rangkaian drone dengan cepat dan murah menggunakan komponen yang sangat biasa. Di salah satu posting saya sebelumnya, kita belajar bagaimana membuat mesin terbang quadcopter yang relatif kompleks dan karena itu efisien tanpa menggunakan mikrokontroler, untuk info lebih lanjut Anda ingin melalui posting berikut:
Sirkuit Remote Control tanpa MCU | Sirkuit Elektronik
Pada artikel kali ini kami mencoba membuat desain di atas lebih sederhana dengan menghilangkan motor brushless dan menggantinya dengan motor brush, dan akibatnya memungkinkan untuk menghilangkan kompleks Modul rangkaian driver BLDC .
Karena detail konstruksi mekanis dari quadcopter sudah dibahas di atas secara komprehensif, kita hanya akan membahas bagian desain sirkuit dan mempelajari bagaimana hal itu dapat dibangun untuk menerbangkan sirkuit drone paling sederhana yang diusulkan.
Seperti disebutkan sebelumnya, quadcopter sederhana ini hanya membutuhkan modul kendali jarak jauh RF dasar seperti yang ditunjukkan pada gambar contoh di bawah ini:

Kamu akan membutuhkan beli modul RF ini dari toko online mana pun atau dari dealer suku cadang elektronik lokal Anda:
Selain yang disebutkan di atas Modul RF remote 4 motor sikat magnet permanen juga akan dibutuhkan yang sebenarnya merupakan jantung dari mesin drone. Itu bisa seperti yang ditentukan pada gambar berikut dengan deskripsi yang diberikan, atau yang serupa lainnya sesuai spesifikasi pengguna yang diperlukan:

Spesifikasi Kelistrikan Motor:
- 6V = tegangan operasi (puncak 12V)
- 200mA = arus operasi
- 10.000 = RPM
Daftar Bagian
- 1K, 10K 1/4 watt = 1 masing-masing
- Kapasitor 1uF / 25V = 1tidak
- Preset 10K atau 5K = 1no
- Rx = resistor wirewound 5 watt, nilai yang akan dikonfirmasi dengan eksperimen.
- IC 555 = 1tidak
- 1N4148 Dioda = 2nos
- IRF9540 Mosfet = 1tidak
- 6V Motor Brushed Type = 4nos
- Kabel fleksibel, solder, fluks dll.
- PCB tujuan umum untuk merakit bagian-bagian di atas
- 4 Channel RF Remote Control Module, seperti yang ditunjukkan pada gambar yang relevan.
- Saluran Aluminium, sekrup, mur, pelat dll seperti yang dijelaskan dalam artikel.
- Baterai seperti yang ditunjukkan di bawah ini:

Cara Mengonfigurasi Penerima Remote Control dengan Motor
Sebelum memahami cara mengkonfigurasi penerima remote control dengan motor quadcopter, penting untuk mempelajari bagaimana kecepatan motor seharusnya disetel atau disejajarkan untuk menghasilkan gerakan kiri, kanan, maju, mundur yang diperlukan.
Pada dasarnya ada dua cara sebuah quadcopter dapat diaktifkan untuk bergerak, yaitu di '+' dan 'x'modes. Dalam desain kami, kami menggunakan mode gerak '+' dasar untuk drone kami, seperti yang ditunjukkan pada diagram berikut:

Mengacu pada diagram di atas, kami menyadari bahwa kami hanya perlu meningkatkan kecepatan motor yang relevan untuk mengeksekusi manuver arah yang diinginkan pada drone.
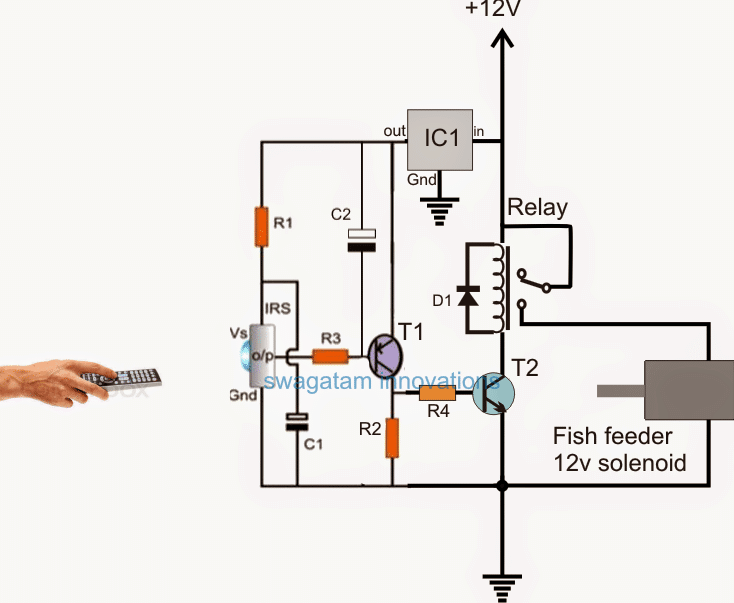
Peningkatan kecepatan ini dapat dilakukan dengan mengkonfigurasi relai kendali jarak jauh sesuai dengan diagram pengkabelan berikut. Pada diagram di bawah ini kita dapat melihat file Sirkuit IC 555 PWM disambungkan dengan 4 relai modul penerima remote control dari 6 relai (1 relai tidak digunakan dan dapat dilepas begitu saja untuk mengurangi ruang dan berat).
Menyesuaikan PWM
Seperti dapat disaksikan dalam diagram, umpan PWM dihubungkan dengan semua kontak N / C dari relai, yang menyiratkan bahwa biasanya quadcopter akan melayang melalui umpan PWM yang seragam dan sama, yang siklus tugas awalnya dapat disesuaikan sedemikian rupa sehingga quadcopter mampu mencapai jumlah daya dorong dan ketinggian yang tepat.
Ini dapat dilakukan dengan menyesuaikan pot PWM yang ditampilkan secara tepat.
Cara Mengonfigurasi Kontak Relay
Kontak N / O relai dapat dilihat dengan kabel langsung dengan suplai positif, jadi setiap kali tombol yang relevan ditekan pada handset pemancar jarak jauh, relai yang sesuai diaktifkan di modul penerima, yang pada gilirannya memungkinkan motor yang relevan untuk mendapatkan pasokan 12V penuh dari baterai.
Operasi di atas memungkinkan motor yang diaktifkan untuk mendapatkan kecepatan lebih dari motor lainnya yang memungkinkan quadcopter untuk bergerak menuju arah yang ditentukan.
Segera setelah tombol jarak jauh dilepaskan, drone berhenti seketika dan terus melayang dalam mode konstan.
Secara identik, gerakan arah lainnya dapat dengan mudah dicapai dengan menekan tombol lain yang ditetapkan, pada handset jarak jauh.
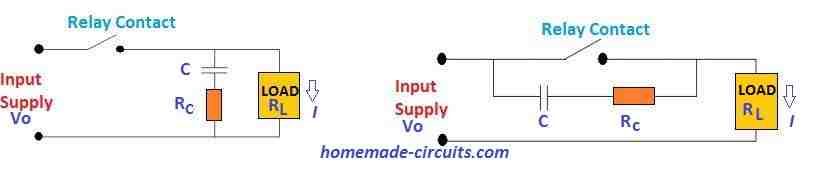
Relai paling atas adalah untuk memastikan pendaratan mesin yang aman, ini dilakukan dengan menambahkan resistor penurunan arus secara seri dengan kontak N / O dari relai yang ditunjukkan.
Nilai resistor ini harus dihitung dengan beberapa eksperimen sehingga quadcopter melayang sekitar beberapa kaki di atas tanah setiap kali resistor ini dimatikan melalui relai terpasang.
Diagram Sirkuit

Relai yang ditampilkan adalah bagian dari penerima modul RF, yang kontaknya awalnya tidak terhubung (kosong secara default) dan perlu dihubungkan seperti yang ditunjukkan pada diagram di atas.
Penerima jarak jauh RF seharusnya dipasang di dalam quadcopter dan relai dihubungkan dengan motor dan baterai yang relevan sesuai tata letak yang ditunjukkan di atas.
Anda dapat melihat beberapa konektor (berwarna hijau) yang dapat menambah beban pada drone. Anda dapat melepas semuanya untuk mengurangi berat, dan menghubungkan kabel yang relevan langsung ke PCB dengan menyolder.
Bagaimana Drone Bergerak:
Seperti dijelaskan dalam pembahasan di atas, ketika tombol remote tertentu ditekan, itu menggerakkan relai yang sesuai dari modul quadcopter yang menyebabkan motor yang bersangkutan bergerak lebih cepat.
Operasi ini pada gilirannya memaksa mesin untuk bergerak ke arah yang berlawanan dengan motor yang dialihkan untuk berputar pada RPM yang lebih cepat.
Jadi misalnya, peningkatan kecepatan motor selatan menyebabkan mesin bergerak ke arah utara, meningkatkan motor utara menyebabkannya bergerak ke selatan, demikian pula peningkatan kecepatan motor timur menyebabkan mesin bergerak ke barat dan sebaliknya.
Menariknya, meningkatkan motor selatan / timur memungkinkan quadcopter untuk bergerak ke arah berlawanan utara / barat yang dalam mode diagonal .... dan seterusnya.
Pro dan Kontra di atas dijelaskan rangkaian remote control Qaudcopter Sederhana.
Pro
- Murah, dan mudah dibangun bahkan oleh penghobi yang relatif baru.
- Tidak membutuhkan pengoperasian joystick yang rumit.
- Dapat dikontrol menggunakan modul remote control 6 saluran tunggal
Kontra
- Kurang efisien dalam hal baterai cadangan karena keterlibatan motor yang disikat
- Kecepatan arah konstan dan tidak dapat divariasikan melalui handset remote control
- Manuver mungkin tidak mulus, agak tersentak-sentak saat mengganti tombol.
Sepasang: Penjelasan Resistor Penginderaan Paksa Berikutnya: Pembagi Tegangan Kapasitif