Pada postingan kali ini kita akan membahas apa itu motor BLDC dan selanjutnya kita belajar mengenai desain rangkaian driver motor BLDC tanpa sensor.
Kipas CPU BLDC
Apakah Anda melihat kipas yang bergerak cepat di CPU, penstabil tegangan, pemutar DVD, dan peralatan serupa lainnya, yang bekerja dengan efisiensi maksimal, memakan ruang minimum, arus, namun mampu memberikan operasi penting seperti yang ditetapkan untuk peralatan tertentu?
Ya, ini semua adalah versi modern dari kipas BLDC atau motor DC tanpa sikat yang jauh lebih unggul daripada motor sikat tradisional lama.

Gambar Courtesy: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Namun motor BLDC akan membutuhkan sirkuit driver yang canggih, dan ya semua kipas CPU ini berisi modul driver ini secara built-in, meskipun ini tampak mudah dioperasikan menggunakan DC biasa, secara internal sistem sudah dilengkapi dengan sirkuit pintar.
Pengemudi Motor BLDC
Di sini kita akan belajar tentang salah satu rangkaian driver motor BLDC yang cerdas, menggunakan chip tunggal DRV10963 untuk mengendarai motor BLDC kecil dengan efisiensi yang luar biasa, dan nanti di salah satu artikel yang akan datang kita akan melihat bagaimana rangkaian IC ini dapat ditingkatkan untuk mengemudi bahkan BLDC arus tinggi yang kuat seperti yang ada digunakan di quadcopters.
Namun sebelum ini akan menarik untuk mempelajari sedikit tentang motor BLDC.
Perbedaan Antara Motor DC Brushed dan Brushless
Perbedaan antara motor yang disikat dan motor tanpa sikat dan tingkat efisiensinya cukup jelas.
Karena motor yang disikat memiliki armatur luka itu sendiri yang bergerak di antara magnet, harus menggunakan 'sikat' (kontak gosok) sehingga terminal koil yang bergerak dapat menerima tegangan suplai secara konsisten tanpa harus mencapai sumber suplai itu sendiri, yang sebaliknya akan membuat bekerja tidak mungkin dan membahayakan operasi.
Pada motor brushless, kumparan atau belitan tidak pernah bergerak dan konstan, di sini rotor membawa sekumpulan magnet permanen dan berputar dalam pengaruh fluks magnet belitan di sekitarnya.
Karena magnet bebas dari semua kerepotan, dan dapat bekerja tanpa melibatkan terminal untuk mengelola atau menerima daya, magnet dapat bergerak dengan mudah, berputar dengan kecepatan tinggi dan secara virtual pada tingkat tanpa suara.
Tapi ada batasan di sini. Untuk membuat elektromagnet merespons fluks magnet permanen, perlu ada pergeseran fase atau kutub magnet yang konstan, sehingga kedua pasangan dapat terus bereaksi dan melewati gaya yang berlawanan sehingga melepaskan gaya torsi yang diperlukan di atas rotor dan jalankan rotasi dengan torsi yang dihasilkan.
Pada motor yang disikat, ini menjadi lebih mudah karena sifat penyesuaian diri dari kumparan jangkar yang mampu berputar dan menciptakan gaya magnet berlawanan yang menopang diri dan terus berputar tanpa memerlukan pulsa atau pemrosesan eksternal.
Namun dalam BLDC ini menjadi masalah karena rotor magnet tetap 'clueless' dan memerlukan perintah magnet yang dihitung dari belitan agar dapat berputar dengan cara yang berarti dan tidak dengan cara sembarangan.
Itulah mengapa semua motor BLDC wajib membutuhkan rangkaian driver motor untuk mengatur tiga set belitan yang berbeda di dalam motor.
Jadi semua BLDC pada dasarnya adalah motor 3-fase dan wajib membutuhkan 3 fase untuk menghasilkan torsi rotasi pada rotor.
Apa yang Dilakukan Driver BLDC Tanpa Sensor
Rangkaian driver BLDC tanpa sensor hanya mengaliri 3 set belitan secara berurutan sehingga rotor magnetis mampu melewati gaya berlawanan yang konsisten yang memungkinkan motor mencapai torsi dan gaya rotasi yang berkelanjutan.
Tetapi pengaktifan sekuensial dari belitan BLDC oleh rangkaian ini tidak dapat diatur secara acak, itu harus dilakukan secara bersamaan atau sebagai respons terhadap posisi rotasi magnet rotor, jika tidak implementasinya bisa rusak dan kita dapat menyaksikan poros motor (rotor ) berputar sembarangan, yaitu menyentak antara searah jarum jam dan berlawanan arah jarum jam tanpa rotasi yang masuk akal.
Mengapa Sensor Digunakan pada Motor BLDC
Oleh karena itu, kami memperkenalkan sensor yang ditempatkan di dalam banyak varian motor BLDC, sensor ini (biasanya sensor efek Hall) 'memahami' perubahan posisi kutub magnet magnet rotor, menginstruksikan sirkuit prosesor yang terpasang untuk mengaliri belitan yang sesuai dan melakukan gerakan rotasi. dengan torsi optimal.
Sensor efek hall digunakan secara efektif di sebagian besar motor BLDC yang ukurannya relatif lebih besar, tetapi untuk motor yang lebih kecil seperti pada kipas CPU, drive CPU, pemutar DVD, pada kipas buang kecil, untuk motor yang digunakan pada quadcopter, sensor efek hall dapat menjadi tidak sesuai. dan oleh karena itu pendekatan alternatif tanpa sensor diterapkan.
Ini melibatkan eksploitasi listrik EMF belakang yang melekat pada belitan yang diambil sebagai sumber referensi untuk memproses dan melistriki rangkaian belitan yang relevan dan menjalankan torsi rotasi.

Mensimulasikan Gerakan Rotor BLDC
Dalam simulasi kasar di atas, kita dapat memvisualisasikan bagaimana EMF yang dilepaskan kembali diambil sebagai referensi dan digunakan untuk menghasilkan pulsa sekuensing untuk set belitan berikutnya, yang menerapkan torsi putar pada rotor magnet permanen pusat. Simulasi mungkin bukan replikasi yang tepat, namun memberikan gambaran kasar tentang prinsip kerja.
Menarik untuk dicatat bahwa pulsa dinyalakan ketika N / S magnet berada tepat di tengah inti belitan, yang memungkinkan belitan untuk berenergi baik sebagai N atau S tergantung pada polaritas pulsa dan menghasilkan penarikan dan penolakan. gaya pada magnet N / S, sehingga menghasilkan torsi yang diperlukan pada tingkat semaksimal mungkin.
Dan ini pada gilirannya menjadi mungkin karena EMF belakang dilepaskan melalui peralihan dari belitan sebelumnya.
Pembahasan di atas menjelaskan cara kerja motor BLDC tanpa sensor, sekarang mari kita pelajari bagaimana rangkaian yang ditentukan menangani eksekusi kompleks di atas dari sakelar 3 fasa.
Driver BLDC DRV10963
Setelah beberapa Googling, saya menemukan rangkaian driver BLDC tanpa sensor ini menggunakan chip tunggal DRV10963 yang menggunakan jumlah bagian yang dapat diabaikan dalam konfigurasi namun mampu menerapkan pemrosesan yang canggih untuk tindakan yang dimaksudkan.
DRV10963 adalah chip canggih yang secara khusus dirancang untuk mengoperasikan motor BLDC tanpa sensor dengan hanya mengantisipasi EMF belakang dari belitan motor dan memberikan perintah yang tepat pada belitan dan mencapai torsi rotasi optimal di atas rotor.
Diagram Sirkuit

Gambar di atas menunjukkan tata letak sederhana dari rangkaian yang tampaknya tidak mencakup apa pun kecuali IC itu sendiri.
Berbagai pinout dialokasikan untuk menjalankan fungsi yang ditentukan seperti kontrol kecepatan PWM motor, kontrol arah, dll. Cukup dengan memasukkan pinout yang relevan dengan data yang ditentukan dari sumber eksternal.
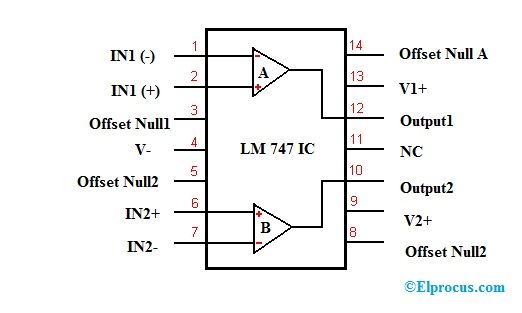
Gambar berikut menunjukkan paket chip, yang terlihat seperti IC DIL 10 pin, berbagai fungsi pinout yang sama dapat dipelajari dari data seperti yang ditampilkan di bawah diagram:

Mengacu pada diagram sirkuit dari sirkuit driver BLDC tanpa sensor yang diusulkan Seperti yang tersaji pada artikel sebelumnya dan juga gambar chip di atas, detail pinout tersebut dapat dipahami sebagai berikut:
Rincian Pinout IC
FG = Ini adalah pin (output) indikator kecepatan motor, yang dipasang dalam mode kolektor terbuka dengan BJT internal.
Kolektor terbuka menandakan bahwa output pada pinout ini akan menghasilkan PWM negatif melalui logika tenggelam di kolektor terbuka dan ground, sehingga untuk mendapatkan pembacaan yang valid pengguna perlu menghubungkan resistor pull-up melintasi kolektor terbuka ini dan suplai positif (5V) ) untuk mencapai indikasi kecepatan pada pinout ini.
FGS = Ini adalah input pemilih indikator kecepatan, yang berarti logika tinggi atau rendah dapat dimasukkan di sini untuk menghidupkan / mematikan pin indikator FG.
Vcc = Pasokan positif ke IC untuk memungkinkannya beroperasi, tidak boleh melebihi 5V.
W, U dan V adalah keluaran 3 fasa untuk motor BLDC yang seharusnya dioperasikan melalui IC ini. Ini juga bertindak seperti input untuk merasakan pulsa EMF motor untuk sakelar tersinkronisasi yang diperlukan dari kumparan motor.
GND = Mengacu pada pinout suplai negatif dari IC sehubungan dengan pin Vdd.
FR = Membantu memilih atau memerintahkan arah motor dan dapat diubah secara dinamis kapan saja setelah sistem dinyalakan, cukup dengan memasukkan logika tinggi eksternal atau logika rendah.
PWM = Ini menandakan input kontrol PWM dari sebuah generator bentuk gelombang PWM eksternal.
Input PWM ini dapat berupa variabel untuk menerapkan kontrol kecepatan yang diinginkan dari motor BLDC yang terhubung.
Ruang bertitik di tengah chip menunjukkan bantalan termal, yang dapat dijepit atau ditekan dengan heatsink untuk menenggelamkan kemungkinan pembentukan panas pada chip saat sedang digunakan dengan motor BLDC yang dibebani.
Pembahasan di atas menyatakan pinout atau detail koneksi chip driver motor BLDC tanpa sensor DRV10963, sekarang mari kita analisis konfigurasi internal dan fungsi chip secara detail dengan bantuan poin-poin berikut:
Deskripsi perangkat
DRV10963 adalah operator motor listrik tanpa sensor 3 fase dengan MOSFET daya bawaan (jembatan-H 3 fase). Ini disesuaikan untuk produktivitas yang lebih tinggi, mengurangi kebisingan, dan meminimalkan fungsi penggerak motor penghitungan material sekunder. Skema manajemen sinusoidal 180 ° tanpa sensor tanpa sensor jendela memberikan efisiensi perjalanan motor yang bebas bising.
DRV10963 terdiri dari fungsi deteksi kunci pintar, yang digabungkan dengan sirkuit keamanan bawaan tambahan untuk mencapai kinerja yang aman. DRV10963 dapat ditemukan dalam kemasan USON 10-pin yang efisien secara termal dengan alas termal tidak tertutup.
Bagaimana IC Bekerja
Produk DRV10963 adalah operator motor tanpa sensor 3 fase dengan MOSFET daya yang diinfuskan
dibuat khusus untuk kinerja yang unggul, resonansi yang lebih rendah, dan fungsi penggerak motor dangkal minimum.
Rencana kontrol sinusoidal 180 ° tanpa jendela tanpa sensor utama menghadirkan fungsi motor tanpa suara dengan mempertahankan nominal riak torsi yang distimulasi secara elektrik. Setelah inisialisasi, perangkat DRV10963 akan memutar motor dalam jalur yang ditentukan melalui pin input FR.
Chip DRV10963 akan berfungsi sebagai motor BLDC 3 fase yang menggunakan rencana kontrol sinusoidal.
Signifikansi tegangan fasa sinusoidal yang digunakan tergantung pada siklus kerja pin PWM. Saat motor bergerak, IC DRV10963 mengirimkan data kecepatan pada pin FG.
Unit DRV10963 terdiri dari kemampuan sensor kunci pintar. Dalam kejadian seperti itu di mana motor terhambat oleh tekanan asing, program akan mengidentifikasi masalah penguncian dan akan mengambil tindakan untuk mengamankannya sendiri bersama dengan motor.
Prosedur khusus dari rangkaian sensor kunci digambarkan secara rinci dalam Deteksi Kunci. IC DRV10963 selanjutnya mencakup beberapa sirkuit pengaman built-in seperti proteksi arus berlebih, proteksi tegangan berlebih, proteksi voltase, dan proteksi suhu berlebih.
Penjelasan Karakteristik
Kecepatan Input dan Kontrol
DRV10963 menyajikan output PWM 3-fase 25-kl-lz yang mungkin memiliki persentase standar bentuk gelombang sinusoidal dari fase ke fase. Jika ada siklus yang ditentukan berkaitan dengan ground, bentuk gelombang yang terdeteksi kemungkinan besar merupakan sinusoid yang dilindungi PWM yang dikombinasikan dengan harmonisa orde 3 seperti yang ditunjukkan pada Gambar 2.

Strategi pengkodean ini merampingkan spesifikasi driver karena mungkin akan sering ada satu keluaran fase yang bisa setara dengan nol.
Amplitudo hasil bervariasi sesuai dengan tegangan suplai (VCC) dan siklus kerja PWM yang diamanatkan (PWM) seperti yang didefinisikan dalam Persamaan 1 dan disorot pada Gambar 3. Amplitudo optimal diimplementasikan setelah siklus kerja PWM yang diinstruksikan adalah 100 PERSEN.
Vphpk = PWMdc>

Kecepatan motor diatur tidak secara langsung melalui penggunaan rangkaian PWM untuk mengatur amplitudo tegangan fasa yang kebetulan digunakan untuk motor.
Siklus kerja input PWM diubah menjadi kuantitas digital 9 bit (dari 0 hingga 511).
Resolusi regulasi adalah 1/512 == 0,2%. Penganalisis siklus tugas memfasilitasi operasi pertukaran pesanan awal di antara siklus tugas input dan angka digital 9 bit.
Ini disorot pada Gambar 4, di mana r = 80 ms.

Kinerja pertukaran antara siklus tugas yang dipesan PWM bersama dengan amplitudo maksimum keluaran adalah variabel dalam perangkat DRV10963.
Amplitudo maksimum hasil dibahas dengan Persamaan 1 ketika perintah PWM> siklus kerja fungsi minimum. Siklus kerja operasi terendah seringkali ditetapkan hingga mungkin 13%, 10%, 5% atau tanpa batasan oleh pengaturan OTP (MINOP_DC1: 0).
Tabel 1 menunjukkan konfigurasi yang direkomendasikan untuk siklus kerja operasi minimal.
Kapanpun PWM menginstruksikan siklus kerja kurang dari siklus kerja fungsi terendah dan lebih dari 1,5%, output akan diatur pada siklus kerja operasi minimal. Setiap kali siklus tugas input di bawah 1,5%, perangkat DRV10963 kemungkinan besar tidak akan menjalankan output, dan dikirim ke mode siaga.
Hal ini dapat diilustrasikan pada Gambar 6.

Konfigurasi Rotasi
DRV10963 akan menghidupkan motor dengan menggunakan teknik yang dijelaskan secara rinci pada Gambar 7.

Grafik inisialisasi motor terdiri dari perangkat alternatif yang dapat dikonfigurasi untuk loop terbuka untuk menutup batas pergantian loop (HOW.), Menyelaraskan waktu (TAHQH), dan mempercepat laju (RACE).
Untuk menyejajarkan rotor ke logika pergantian, DRV10963 menjalankan siklus kerja x% pada fase V dan W pada saat yang sama mengontrol fase U di GND.
Skenario ini bertahan selama beberapa detik TAIign. Signifikansi x% diidentifikasi oleh tegangan VCC (seperti yang ditunjukkan pada Tabel 2) untuk menjaga torsi rotasi yang cukup pada berbagai tegangan suplai yang berbeda.
Saat urutan penyelarasan selesai, motor dipaksa untuk mempercepat dengan memasang tegangan fasa sinusoidal dengan tingkat puncak seperti yang diilustrasikan dalam Tabel 2 dan meningkatkan dengan menggunakan rentang pergantian pada tingkat yang meluas yang diwakili oleh RACE sampai tingkat pergantian tumbuh ke Hom ., Hz.
Segera setelah batas ini tercapai, DRV'l0963 mengubah ke mode loop tertutup di mana perkembangan penggerak pergantian dikenali oleh algoritme kontrol bawaan sementara voltase yang digunakan diidentifikasi oleh input siklus tugas yang diamanatkan PWM.
Loop terbuka untuk menutup batas pergantian loop (Hom), menyelaraskan waktu (TAHQH), dan laju percepatan (RACE) dapat dikonfigurasi melalui konfigurasi OTP.
Pemilihan ambang batas handoff (HOW,) biasanya disetujui oleh penilaian coba-coba. Tujuannya adalah untuk memilih toleransi handoff yang bisa sesedikit mungkin dan memungkinkan motor dengan mudah dan tepat berpindah antara akselerasi loop terbuka dan akselerasi loop tertutup.
Biasanya peningkatan kecepatan motor (kecepatan maksimum) memerlukan toleransi handoff yang lebih baik karena motor kecepatan tinggi mengandung Kt yang lebih rendah sehingga BEMF lebih terjangkau.
Tabel 3 menunjukkan preferensi yang dapat dikonfigurasi untuk toleransi handoff. Kecepatan tertinggi dalam Hz listrik terbukti sebagai referensi untuk membantu memilih kecepatan handoff yang diinginkan untuk pengajuan tertentu.

Pemilihan waktu penyelarasan (TAHQH) dan kecepatan akselerasi (RACE) bahkan dapat bergantung pada pengujian coba-coba.
Motor dengan inersia yang lebih besar biasanya membutuhkan waktu penyelarasan yang lebih lama dan kecepatan peningkatan yang lebih lambat dibandingkan dengan motor dengan inersia rendah yang biasanya membutuhkan waktu penyelarasan yang lebih singkat dengan persentase percepatan yang lebih cepat. Pengorbanan program perlu diterapkan untuk memanfaatkan stabilitas peluncuran dan bukan periode rotasi naik.
TI mendukung dimulai dengan memutuskan konfigurasi yang kurang intens (RACE lebih lambat dan Tmign signifikan) untuk mengurangi waktu torsi guna mendukung tingkat pemenuhan maksimum.
Segera setelah peralatan dikonfirmasi untuk melakukan secara teliti, konfigurasi yang lebih kuat (RACC yang lebih besar dan TAHQH yang lebih rendah) dapat digunakan untuk mengurangi momen penyalaan dan pada saat yang sama secara hati-hati melacak tingkat pemenuhan.
Tabel 4 menunjukkan pengaturan yang dapat dikonfigurasi untuk TA'g ,, dan RACE.

Bagian selanjutnya dari penjelasan mengenai IC BLDC tanpa sensor ini telah dilengkapi di lembar data asli ini
Silakan berkomentar untuk mengetahui lebih banyak mengenai detail rangkaian driver motor BLDC tanpa sensor yang dibahas di atas
Sepasang: Sirkuit Catu Daya Ransel LED 12V Berikutnya: Sirkuit Remote Control Quadcopter tanpa MCU