Mesin listrik itu mengubah energi listrik menjadi energi mekanik disebut motor listrik. Motor listrik pertama dan terpenting adalah perangkat elektrostatis sederhana yang dibuat oleh biksu Skotlandia Andrew Gordon pada tahun 1740-an. Namun pada tahun 1821, Michael Faraday mendemonstrasikan pengubahan energi listrik menjadi energi mekanik.
Motor listrik pada dasarnya diklasifikasikan menjadi dua kategori: motor AC dan Motor DC . Sekali lagi, setiap kategori dibagi lagi menjadi banyak jenis. Banyak beban seperti mixer, penggiling, kipas angin, dll., Peralatan rumah tangga yang paling sering digunakan di mana kita dapat menemukan berbagai jenis motor dan ini dapat dioperasikan pada kecepatan yang berbeda dengan penyediaan pengatur kecepatan motor. Pada artikel ini, kita akan membahas tentang salah satu jenis utama motor DC yaitu Motor stepper dan kendalinya menggunakan mikrokontroler.
Motor Stepper
Sinkron dan motor DC tanpa sikat yang mengubah pulsa listrik menjadi gerakan mekanis dan dengan demikian, berputar secara bertahap dengan sudut tertentu di antara setiap langkah untuk menyelesaikan putaran penuh disebut sebagai Motor Stepper. Sudut antara langkah-langkah putaran motor stepper disebut sebagai sudut stepper motor.

Motor Stepper
Motor stepper diklasifikasikan menjadi dua jenis menurut belitannya: Motor Stepper Unipolar dan Motor Stepper Bipolar. Motor stepper unipolar sering digunakan dalam banyak aplikasi karena kemudahan pengoperasiannya dibandingkan dengan motor stepper bipolar. Tetapi ada berbagai jenis motor stepper seperti Permanent Magnet Stepper Motor, Variable Reluctance Stepper Motor, dan Hybrid Stepper Motor.
Kontrol Motor Stepper
Motor stepper dapat dikontrol dengan berbagai teknik, tetapi di sini kita membahas pengendalian motor stepper menggunakan Mikrokontroler Atmega . 89C51 adalah mikrokontroler dari 8.051 keluarga mikrokontroler .

Diagram Blok Kontrol Motor Stepper
Diagram blok kontrol motor stepper menggunakan mikrokontroler 8051 ditunjukkan pada gambar dengan Sumber Daya listrik , mikrokontroler, motor stepper dan blok sakelar kontrol.
2 Metode Perancangan Sirkuit Kontrol Motor Stepper
Pengontrol motor stepper dirancang menggunakan 8.051 mikrokontroler dan sirkuit switching untuk mengontrol kecepatan motor stepper. Sirkuit sakelar kontrol dapat dirancang dengan menggunakan saklar transistor atau dengan menggunakan IC pengontrol motor stepper seperti ULN2003 sebagai pengganti transistor.
1. Rangkaian Kontrol Menggunakan IC Pengendali Motor Stepper
Motor stepper unipolar dapat diputar dengan memberi energi pada kumparan stator secara berurutan. Urutan sinyal tegangan yang diterapkan di seluruh kumparan atau kabel motor sudah cukup untuk menggerakkan motor dan oleh karena itu, tidak diperlukan rangkaian penggerak untuk mengontrol arah arus dalam kumparan stator.

Kontrol Motor Stepper menggunakan IC
Motor stepper dua fase terdiri dari empat kabel ujung yang terhubung ke kumparan dan dua kabel umum yang terhubung ke dua ujung ujung untuk membentuk dua fase. Titik umum dan titik akhir dari kedua fase tersebut masing-masing dihubungkan ke ground atau Vcc dan pin mikrokontroler. Untuk memutar motor, titik-titik akhir dari dua fasa harus diberi energi. Terutama tegangan diterapkan ke titik akhir pertama dari fase1, dan tegangan selanjutnya diterapkan ke titik akhir pertama dari fase2, dan seterusnya.
Motor stepper dapat dioperasikan dalam berbagai mode seperti Mode Stepping Drive Gelombang, Mode Stepping Drive Penuh dan Mode Stepping Setengah Drive.
Mode Melangkah Drive Gelombang
Dengan mengulang urutan di atas, motor dapat diputar dalam mode penggerak gelombang baik searah jarum jam atau berlawanan arah jarum jam berdasarkan pemilihan titik akhir. Tabel di bawah ini menunjukkan urutan fase sinyal untuk mode penggerak gelombang.


Mode Melangkah Drive Gelombang
Mode Melangkah Drive Penuh
Memberi energi pada dua titik akhir dari fase yang berbeda secara bersamaan mencapai mode langkah penggerak penuh. Tabel menunjukkan urutan fase sinyal untuk mode langkah drive penuh.


Mode Melangkah Drive Penuh
Mode Melangkah Setengah Drive
Kombinasi langkah-langkah gelombang dan mode langkah-drive-penuh mencapai mode melangkah-setengah-drive. Jadi, dalam mode ini, sudut loncatan dibagi menjadi dua. Tabel menunjukkan urutan fase sinyal dari mode setengah langkah drive.


Mode Melangkah Setengah Drive
Secara umum, sudut loncatan bergantung pada resolusi motor stepper. Ukuran langkah dan arah rotasi berbanding lurus dengan jumlah dan urutan urutan input. Kecepatan putar poros bergantung pada frekuensi urutan input. Torsi dan jumlah magnet yang dimagnetisasi pada suatu waktu sebanding.
Motor stepper membutuhkan arus 60mA, namun nilai arus maksimum mikrokontroler Atmega AT89C51 adalah 50mA. Jadi, IC pengontrol motor stepper digunakan untuk menghubungkan motor stepper dengan mikrokontroler untuk mentransfer sinyal.
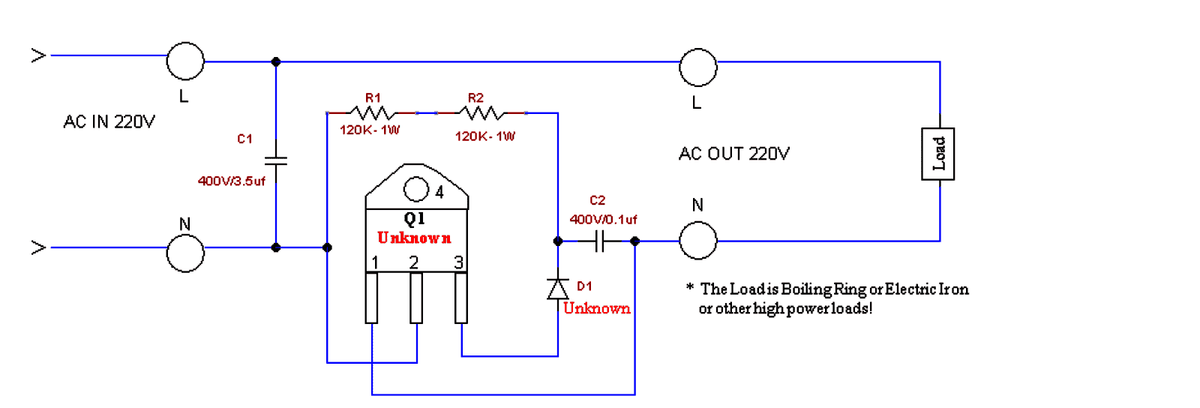
2. Rangkaian Sakelar Kontrol Menggunakan Transistor
Catu daya ke rangkaian dapat diberikan dengan menurunkan tegangan dari 230V ke 7,5V menggunakan transformator penurun, dan kemudian memperbaiki dengan penyearah jembatan dengan dioda . Output yang diperbaiki ini diumpankan ke kapasitor filter, dan kemudian dilewatkan melalui regulator tegangan. Output yang diatur 5V diperoleh dari regulator tegangan. Pin9 reset dihubungkan antara kapasitor dan resistor.

Rangkaian Kontrol Motor Stepper menggunakan Transistor
Secara umum motor stepper terdiri dari empat buah kumparan seperti terlihat pada gambar. Jadi, untuk menggerakkan motor, dibutuhkan empat rangkaian motor-driver. Alih-alih menggunakan IC pengontrol motor stepper untuk menggerakkan motor, empat transistor dihubungkan sebagai rangkaian driver pada masing-masing 21, 22, 23 dan 24 pin mikrokontroler.
Jika transistor mulai konduksi, maka medan magnet akan dibuat di sekitar kumparan yang menyebabkan putaran motor. Kecepatan motor stepper berbanding lurus dengan frekuensi pulsa input. Sebuah osilator kristal dihubungkan ke pin 18 dan 19 untuk memberikan frekuensi clock mikrokontroler sekitar 11.019MHz.
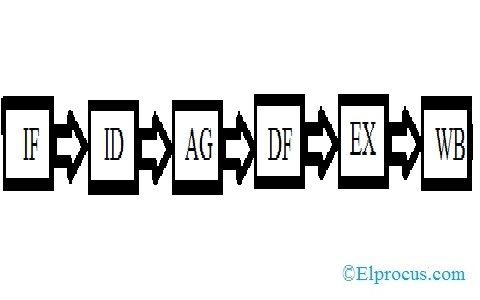
Waktu pelaksanaan setiap instruksi dapat dihitung menggunakan rumus di bawah ini
Waktu = ((C * 12)) / f
Dimana C = jumlah siklus
Dan F = frekuensi kristal
Salah satu rangkaian berbasis aplikasi yang menggunakan motor stepper untuk memutar panel surya dijelaskan di bawah ini.
Kontrol Motor Stepper Menggunakan Mikrokontroler Terprogram 8051
Proyek Panel Surya Pelacakan Matahari dimaksudkan untuk menghasilkan jumlah energi maksimum dengan menyesuaikan panel surya secara otomatis. Dalam proyek ini, motor stepper yang dikendalikan oleh mikrokontroler terprogram dari keluarga 8051 dihubungkan ke panel surya untuk menjaga permukaan panel surya selalu tegak lurus dengan matahari.

Kontrol Motor Stepper Menggunakan Mikrokontroler oleh Edgefxkits.com
Itu mikrokontroler terprogram menghasilkan pulsa listrik bertingkat secara berkala ke motor stepper untuk memutar panel surya. IC driver digunakan untuk menggerakkan motor stepper karena pengontrol tidak dapat menyediakan kebutuhan daya motor.
Silakan tinggalkan saran, umpan balik, dan pertanyaan Anda dengan memposting komentar di bagian komentar di bawah ini. Kami akan melakukan yang terbaik untuk membantu Anda secara teknis terkait artikel ini dan mengembangkan proyek listrik dan elektronik menggunakan motor stepper.